
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
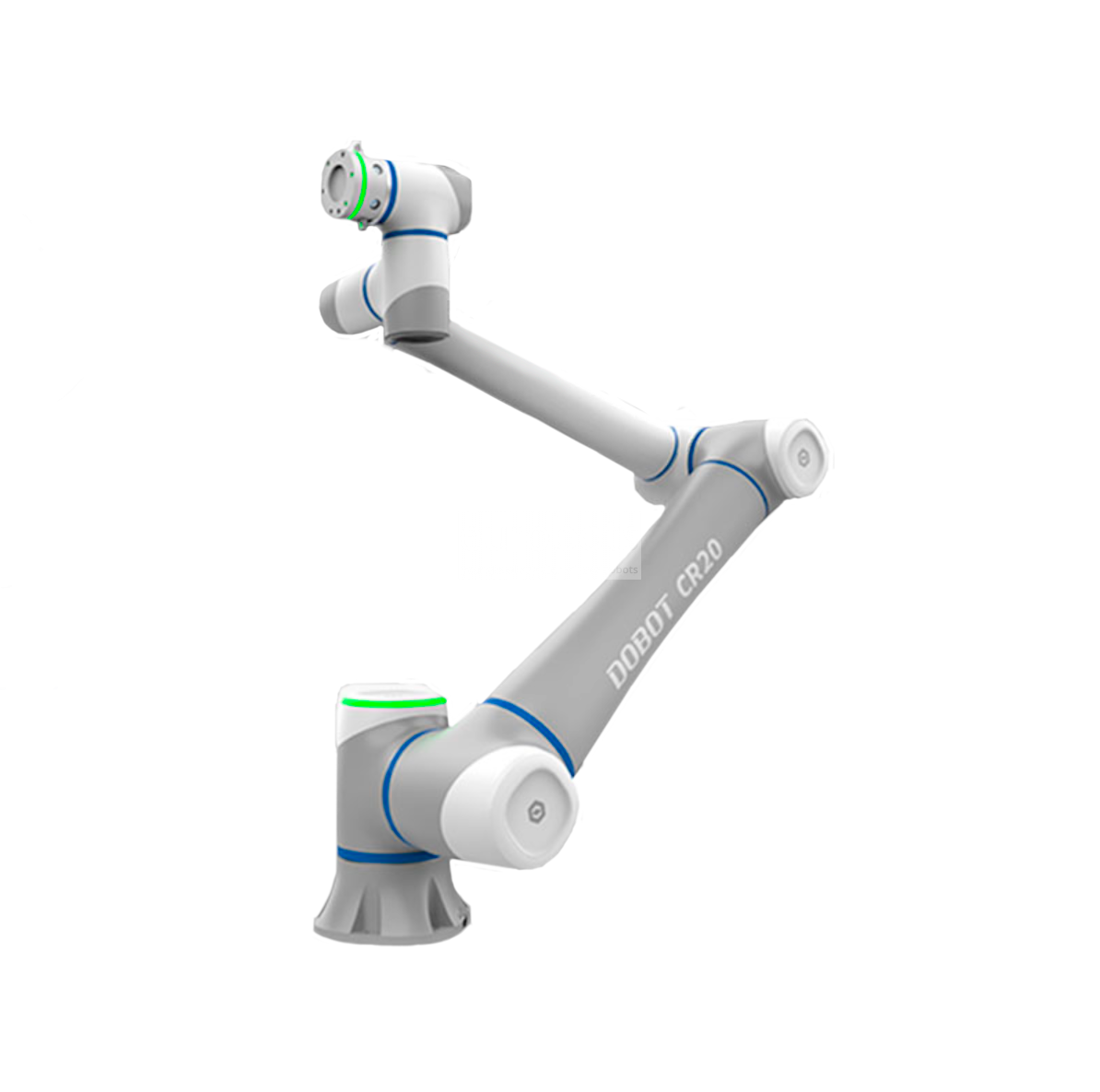
Cobot DOBOT CR20A
S'appuyant sur la sécurité, l'efficacité, la flexibilité et la convivialité de la série CR, le CR20A introduit une percée dans la capacité de charge utile, permettant une charge utile maximale de 20 kg. Cette augmentation significative ouvre une gamme plus large d'applications pour les robots collaboratifs. Avec un rayon de travail généreux de 1 700 mm, le CR20A est bien équipé pour gérer les tâches lourdes telles que le prélèvement, l'emballage, la palettisation et le soudage dans des secteurs tels que l'automobile, l'électroménager, la logistique et la transformation des métaux.
Une caractéristique notable du CR20A est sa première conception d'effecteur terminal à double canal, permettant une connexion directe à plusieurs outils terminaux. De plus, il intègre un indicateur d'état visuel situé à la base, offrant une reconnaissance intuitive de l'état de fonctionnement.
Grâce à son algorithme de contrôle de mouvement avancé, le CR20A assure un fonctionnement stable et réduit les vibrations résiduelles de 50 % lors des arrêts d'urgence à grande vitesse. Il prend en charge les protocoles de communication Profinet et Ethernet/IP, facilitant une connectivité transparente avec les systèmes PLC. De plus, il dispose de 24 ports d'E/S numériques avec une prise en charge exceptionnelle de la commutation PNP et NPN, simplifiant l'expansion des applications.
Le corps du robot et le boîtier de commande du CR20A répondent à un niveau de protection IP54 élevé. En cas de surcharge, le robot déclenche automatiquement une alarme. Le CR20A intègre également un mécanisme de protection de freinage électromagnétique innovant, réduisant la distance de chute de l'outil final en cas de panne de courant.
L'appareil est conçu avec des fonctionnalités conviviales dans le but d'être une conception plug and play, permettant un déploiement rapide à l'aide de divers accessoires disponibles dans notre écosystème. Il offre de multiples options de programmation, y compris une interface graphique (comme scratch), des scripts utilisant des langages de programmation (LUA) ou des API (C, C#, Python, Kotlin...), et la possibilité d'enseigner le robot en le déplaçant manuellement. Cela le rend accessible aux utilisateurs de différents niveaux d'expertise.
De plus, il peut être contrôlé avec des smartphones, des tablettes et des ordinateurs.
| Lester | 70 kg | |
| Charge utile maximale | 20 kg | |
| Rayon de travail | 1 700 millimètres | |
| Vitesse maximale de TCP | 2 000 mm/s | |
| Vitesse maximale des articulations | J1 ~ J2 | 120°/s |
| J3 | 150°/s | |
| J4 ~ J6 | 180°/s | |
| Gamme de mouvement | J1/J2/J4/J5/J6 | ±360° |
| J3 | ±165° | |
| Ports d'E/S | Pouvoir | 24V, nominale 2A, max 3A |
| Ports | 2 connecteurs, RS485/AI, 2 x DO, 2 x DI | |
| Répétabilité | ±0,1mm | |
| Classement IP | IP54 | |
| Bruit | ≤ 70 dB | |
| Environnement de travail | 0° ~ 50°C | |
| Orientation de l'installation | Droit | |
| Longueur du câble au contrôleur | 6 mètres | |
| Matériaux | Acier au carbone, alliage d'aluminium, plastique ABS | |
Applications
Tendance de la presse , Palettisation , Chargement et déchargement de pièces , Manipulation des pièces , Polissage , Assemblage de pièces , Advanced Manufacturing , Education



{kind=link}
{kind=link}